
1. 프로그램 개요
P22는 Green 0 LED, P24는 Red LED, P26은 Green 1 LED가 연결되어 있다.
SYSTEM Clock를 24MHz, CPU Clock를 24MHz로 사용하고, PCA 클럭은 96MHz를 사용한다.
PCA 출력은 CH0(P22), CH1(P33), CH2(P24), CH3(P34), CH4(P26), CH5(P35)로 설정한다.
2개씩 묶어 3쌍을 비교 해 본다.
PWM 주파수는 96MHz/1000 = 96kHz로 설정한다.
P10은 입력으로 사용되며 PWM 출력을 제어한다. 1이면 Enable, 0이면 Disable 이다.
2. 회로도

3. Code
⑴ main routine
void main()
{
u8 cnt,inx; // 변수 선언
bit bOutFlag; // 변수 선언
InitSystem(); // 시스템 초기화
LED_G_0=0;LED_R=0;LED_G_0=0; // LED ALL ON
DelayXms(1000); // 1초 딜레이
LED_G_0=1;LED_R=1;LED_G_1=1; // LED ALL OFF
wDuty[0].W=PWM_MIN; // PWM Duty를 100으로 설정
wDuty[1].W=PWM_MIN; // PWM Duty를100으로 설정
wDuty[2].W=PWM_MIN; // PWM Duty를 100으로 설정
bOutFlag=FALSE; // bOutFlag비트의 값을 FALSE로 설정
while(1)
{
DelayXms(1); // 1ms 딜레이
cnt++; // cnt를 +1
if(cnt>=200) // cnt가 200이 넘으면(200ms 마다)
{
cnt=0;
if(bOutFlag==TRUE) // bOutFlag가 TRUE이면
{
inx++; // inx를 +1하고
if(inx>=8) // inx가 8 이상이면
{
inx=0; // inx를 0으로 초기화 시킨다.
}
switch(inx) // inx 값에 따라
{
case 0: // inx = 0이면
// Duty 100% All High
wDuty[0].W=PWM_MIN; // PWM Duty를 100으로 설정
wDuty[1].W=PWM_MIN; // PWM Duty를 100으로 설정
wDuty[2].W=PWM_MIN; // PWM Duty를 100으로 설정
break;
case 1:
// Duty 75%
wDuty[0].W=PWM_1_4; // PWM Duty를 75로 설정
wDuty[1].W=PWM_1_4; // PWM Duty를 75로 설정
wDuty[2].W=PWM_1_4; // PWM Duty를 75로 설정
break;
case 2:
// Duty 50%
wDuty[0].W=PWM_2_4; // PWM Duty를 50으로 설정
wDuty[1].W=PWM_2_4; // PWM Duty를 50으로 설정
wDuty[2].W=PWM_2_4; // PWM Duty를 50으로 설정
break;
case 3:
// Duty 25%
wDuty[0].W=PWM_3_4; // PWM Duty를 25로 설정
wDuty[1].W=PWM_3_4; // PWM Duty를 25 로 설정
wDuty[2].W=PWM_3_4; // PWM Duty를 25로 설정
break;
case 4:
// Duty 0% All low
wDuty[0].W=PWM_MAX; // PWM Duty를 0로 설정
wDuty[1].W=PWM_MAX; // PWM Duty를 0로 설정
wDuty[2].W=PWM_MAX; // PWM Duty를 0로 설정
break;
case 5:
// Duty 25%
wDuty[0].W=PWM_3_4; // PWM Duty를 25로 설정
wDuty[1].W=PWM_3_4; // PWM Duty를 25로 설정
wDuty[2].W=PWM_3_4; // PWM Duty를 25로 설정
break;
case 6:
// Duty 50%
wDuty[0].W=PWM_2_4; // PWM Duty를 50으로 설정
wDuty[1].W=PWM_2_4; // PWM Duty를 50으로 설정
wDuty[2].W=PWM_2_4; // PWM Duty를 50으로 설정
wDuty[3].W=PWM_2_4; // PWM Duty를 50으로 설정
break;
case 7:
// Duty 75%
wDuty[0].W=PWM_1_4; // PWM Duty를 75로 설정
wDuty[1].W=PWM_1_4; // PWM Duty를 75로 설정
wDuty[2].W=PWM_1_4; // PWM Duty를 75로 설정
break;
}
// Buffer mode ,CH0/CH1 is reload by CH1
PCA_CH1_SetValue(PCA_CH(wDuty[0].W),PCA_CL(wDuty[0].W));
// Buffer mode,CH2/CH3 is reload by CH3
PCA_CH3_SetValue(PCA_CH(wDuty[1].W),PCA_CL(wDuty[1].W));
// Buffer mode,CH4/CH5 is reload by CH5
PCA_CH5_SetValue(PCA_CH(wDuty[2].W),PCA_CL(wDuty[2].W));
}
}
if(P10==1) // P10에 연결된 버튼이 안눌렸으면
{
if(bOutFlag==FALSE) // bOutFlag가 FALSE일 때
{
bOutFlag=TRUE; // bOutFalg를 TRUE로 만들고
// Enable PWM output, PWM 출력을 동작시킴
PCA_SetPWM0_EnOutput();
PCA_SetPWM1_EnOutput();
PCA_SetPWM2_EnOutput();
PCA_SetPWM3_EnOutput();
PCA_SetPWM4_EnOutput();
PCA_SetPWM5_EnOutput();
}
}
else // P10에 연결된 버튼이 눌렸으면
{
if(bOutFlag==TRUE) // bOutFlag가 TRUE 일 때
{
bOutFlag=FALSE; // bOutFlag를 FALSE로 만들고
// Disable PWM output // PWM 출력을 Disable 시킨다.
PCA_SetPWM0_DisOutput();
PCA_SetPWM1_DisOutput();
PCA_SetPWM2_DisOutput();
PCA_SetPWM3_DisOutput();
PCA_SetPWM4_DisOutput();
PCA_SetPWM5_DisOutput();
}
}
}
}
⑵ 시스템 초기화 루틴
/***********************************************************************************
*Function: void InitSystem(void)
*Description: Initialize MCU
*Input:
*Output:
*************************************************************************************/
void InitSystem(void)
{
InitClock(); // 클럭 설정
InitPort(); // 포트 초기화 설정
InitPCA_PWM() // PCA PWM 모드 설정
}
- 클럭을 설정한다. 시스템 클럭과 MCU 클럭을 24MHz로 설정한다.
- 포트 입/출력을 설정한다.
- PCA PWM 모드를 설정한다.
⑶ Port 초기화
/***********************************************************************************
*Function: void InitPort(void)
*Description: Initialize IO Port
*Input:
*Output:
*************************************************************************************/
void InitPort(void)
{
PORT_SetP2PushPull(BIT2|BIT4|BIT6); // Set P22(CEX0),P24(CEX2),P26(CEX4) as push-pull for PWM output
PORT_SetP3PushPull(BIT3|BIT4|BIT5); // Set P33(CEX1),P34(CEX3),P35(CEX5) as push-pull for PWM output
P10=1;
P11=1;
PORT_SetP1OpenDrainPu(BIT0|BIT1); // Set P10 as open-drain with pull-high
}
- P22, P24, P26을 Push-Pull로 설정해서 PWM 출력을 준비한다.
- P33, P34, P35를 Push-Pull로 설정해서 PWM 출력을 준비한다.
- P10, P11을 Pull-Up을 포함함 Open-Drain으로 설정하고 키 입력 포트로 사용한다.
원 소스 예제에는 P10을 사용했으나 앞선 예제에서 P10을 아날로그 입력 포트로 사용하고, P11을 키 입력으로 사용하였기에 P11을 사용하기 위해 추가하였다.
*** 사용된 매크로함수는 “API_Macro_MG82FG6D16.H”에서 찾아볼 수 있다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_PCA_PWM_16bit\code\include
⑷ 클럭 초기화 루틴 è 시스템 클럭 및 내부 클럭을 설정한다.
프로그램의 루틴 자체는 복잡하게 많이 설정해 두었으나 그 구조는 아래와 같다.
MCU_SYSCLK의 값은 11059200, 12000000, 22118400, 24000000, 29491200, 32000000, 44236800, 48000000로 설정이 가능하며, 각각 프로그램 상단에
#define MCU_SYSCLK 24000000
와 같이 선언해주었다. 그리고, 바로
#define MCU_CPUCLK (MCU_SYSCLK)
로 선언하여 System 클럭과 CPU 클럭을 동일하게 사용하기로 선언하였다. 물론 사용자의 선택에 따라 틀려질 수 있으므로 어플리케이션에 따라 선언하면 된다.
#if (MCU_SYSCLK==24000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=24MHz CpuClk=24MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#else
// SysClk=24MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#endif
#endif
- CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
CKCON0 레지스터의 각 비트를 설정한다.
CKCON0.7 : AFS, Alternated Frequency Selection, 내부 클럭 IHRCO를 12MHz(AFS = 0), 또는 11.059MHz(AFS = 1)로 설정함
CKCON0.6 : ENCKM, X8 클럭 멀티플라이어를 동작시킴
CKCON0.5~4 : OSCin이 12MHz이므로 01을 입력한다.
CKCON0.3 : CCKS, CPU Clock Select, 0:CPU CLOCK = System Clock, 1:CPU CLOCK = System Clock/2
CKCON0.0 ~ 2 : Programable System Clock Select. SYSCLK_MCKDO_DIV_1(System Clock = Master Clock Divider Output)
/***********************************************************************************
*Function: void InitClock(void)
*Description:
* Initialize clock
*Input:
*Output:
*************************************************************************************/
void InitClock(void)
{
#if (MCU_SYSCLK==11059200)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=11.0592MHz CpuClk=11.0592MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1);
#else
// SysClk=11.0592MHz CpuClk=5.5296MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1);
#endif
#endif
#if (MCU_SYSCLK==12000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=12MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1);
#else
// SysClk=12MHz CpuClk=6MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1);
#endif
#endif
#if (MCU_SYSCLK==22118400)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=22.1184MHz CpuClk=22.1184MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#else
// SysClk=22.1184MHz CpuClk=11.0592MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==24000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=24MHz CpuClk=24MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#else
// SysClk=24MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==29491200)
#if (MCU_CPUCLK==MCU_SYSCLK)
// Cpuclk high speed
CLK_SetCpuCLK_HighSpeed();
// SysClk=29.491200MHz CpuClk=29.491200MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#else
// SysClk=29.491200MHz CpuClk=14.7456MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==32000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// Cpuclk high speed
CLK_SetCpuCLK_HighSpeed();
// SysClk=32MHz CpuClk=32MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#else
// SysClk=32MHz CpuClk=16MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==44236800)
// SysClk=44.2368MHz CpuClk=22.1184MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx8, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X8|OSCIn_IHRCO);
#endif
#if (MCU_SYSCLK==48000000)
// SysClk=48MHz CpuClk=24MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx8, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X8|OSCIn_IHRCO);
#endif
// P60 Output MCK/4
//CLK_P60OC_MCKDiv4();
}
⑸ PCA PWM 초기화 루틴
/***********************************************************************************
*Function: void InitPCA_PWM(void)
*Description: Initialize PCA for PWM
*Input:
*Output:
*************************************************************************************/
void InitPCA_PWM(void)
{
PCA_SetCLOCK_CKMIX16(); // 96MHz(Note:Before use CKMIX16/96MHz,need enable CKM(ENCKM=1) at first)
PCA_CH0_SetMode_PWM();
PCA_CH1_SetMode_PWM();
PCA_CH2_SetMode_PWM();
PCA_CH3_SetMode_PWM();
PCA_CH4_SetMode_PWM();
PCA_CH5_SetMode_PWM();
PCA_CH0_SetPWM_16Bit();
PCA_CH1_SetPWM_16Bit();
PCA_CH2_SetPWM_16Bit();
PCA_CH3_SetPWM_16Bit();
PCA_CH4_SetPWM_16Bit();
PCA_CH5_SetPWM_16Bit();
PCA_CH01_SetPWM_EnBufferMode(); // CH0,CH1 Enable buffer mode
PCA_CH23_SetPWM_EnBufferMode(); // CH2,CH3 Enable buffer mode
PCA_CH45_SetPWM_EnBufferMode(); // CH4,CH5 Enable buffer mode
// Set PWM duty
PCA_CH0_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
PCA_CH1_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
PCA_CH2_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
PCA_CH3_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
PCA_CH4_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
PCA_CH5_SetValue(PCA_CH(PWM_MIN),PCA_CL(PWM_MIN));
// Set counter
PCA_SetCounter(PCA_C-PCA_RELOAD);
PCA_SetCounterReload(PCA_C-PCA_RELOAD);
// Disable PWM Output
PCA_SetPWM0_DisOutput();
PCA_SetPWM1_DisOutput();
PCA_SetPWM2_DisOutput();
PCA_SetPWM3_DisOutput();
PCA_SetPWM4_DisOutput();
PCA_SetPWM5_DisOutput();
PCA_SetCEX0CEX2CEX4_P22P24P26(); // Set CEX0:P22,CEX2:P24,CEX4:P26
PCA_CF_DisInterrupt(); // Disable CF interrupt
PCA_EnPCACounter(); // Eanble PCA counter
}
- PCA clock를 CKMIX16의 출력으로 설정한다.
#define PCA_SetCLOCK_CKMIX16() CMOD=(CMOD&(~(CPS2|CPS1|CPS0)))|(CPS2)
96MHz를 사용하기 위해서는 CKM을 먼저 Enable 시켜두어야 한다.(ENCKM=1)
- PWM 모드 설정
#define PCA_CHn_SetMode_PWM() CCAPM0=ECOM0|PWM0
CCAPMn 레지스터의 ECOMn을 셋 시켜서 디지털 컴패래터 기능을 Enable 시키고, PWMn을 셋 시켜서 PWM 기능을 Enable 시키고, CEXn핀이 PWM 출력 핀으로 사용되도록 한다.
- PWM을 16비트로 설정함
#define PCA_CHn_SetPWM_16Bit() PCAPWM0=PCAPWM0|((P0RS0|P0RS1))
PCAPWMn(PWM 모드 보조 레지스터)의 PnRS1, PnRS0를 이용하여 8, 10,12, 16 비트의 길이를 조절할 수 있다.
16 비트이므로 PnRS1, PnRS0를 모두 셋 시킨다.
- Buffer Mode 설정
#define PCA_CH01_SetPWM_EnBufferMode() CMOD=CMOD|BME0
#define PCA_CH23_SetPWM_EnBufferMode() CMOD=CMOD|BME2
#define PCA_CH45_SetPWM_EnBufferMode() CMOD=CMOD|BME4
BME0, 2, 4를 셋 시켜서 CH0, CH1, CH2, CH3, CH4, CH5 모두 버퍼 모드로 동작하도록 한다.
PWM의 듀티를 변화 시키기 위해서는 CCAPnH, CCAPnL 두 개의 레지스터 데이터를 바꿔야 하는데 8bit MCU는 한 번에 한 바이트만 라이팅이 가능하다. 만약 버퍼 모드를 사용하지 않으면 먼저 라이팅한 한 바이트 때문에 잠시 듀티가 원하지 않는 값을 가질 수 있다.
그래서 버퍼모드를 사용해서 그런 에러를 방지한다.
n=1, 3, 5인 레지스터는 버퍼로 사용되고 리로드 시그널이 발생하면 n=0, 2, 4 레지스터에 저장한다. 그리고 이 레지스터가 실제 듀티를 계산하는데 사용된다.
- Duty 설정
#define PCA_CHn_SetValue(x,y)
AUXR2=AUXR2|(CnPLK);
if((x==0)&&(y==0)){PCAPWMn=PCAPWMn|0x03;}
else{CCAPnL=y;CCAP0H=x;PCAPWMn=PCAPWMn&(~0x03);};
AUXR2=AUXR2&(~C0PLK) // 0 0,1
C0PLK를 셋 시켜 주어 PWM/COMP의 버퍼 자동 업데이트가 되지 않도록 한다.
입력된 데이터의 두 값이 모두 0이면 9비트로 레지스터를 확장시켜서, PWM 모드에서 CCAPnH를 9비트 레지스터로 바꾼다.
입력된 데이터의 두 값이 모두 0이면 9비트로 레지스터를 확장시켜서, PWM 모드에서 CCAPnL을 9비트 레지스터로 바꾼다.
CCAPnL, CCAPnH에 각각의 값들을 저장하고, 9비트째 데이터는 클리어시킨다.
설정 값 저장 후 다시 버퍼 자동 업데이트가 되도록 해당 비트를 클리어 시킨다.
- PCA 카운터 초기값 및 리로드될 값 저장
#define PCA_SetCounter(x) CH=HIBYTE(x);CL=LOBYTE(x)
#define PCA_SetCounterReload(x) CHRL=HIBYTE(x);CLRL=LOBYTE(x)
PCA 카운터에 초기 값을 저장하고, 리로드 될 값들도 저장한다.
- Disable PCA Output
#define PCA_SetPWMn_DisOutput() PAOE=PAOE&(~POEn)
#define PCA_SetPWM4_DisOutput() SFRPI=4;AUXR7=AUXR7&(~POE4);SFRPI=0
#define PCA_SetPWM5_DisOutput() SFRPI=4;AUXR7=AUXR7&(~POE5);SFRPI=0
PAOE레지스터의 POEn과 AUXR7 레지스터의 POE4, POE5는 PWM파형이 해당 출력 핀으로 연결되는 것을 보조적으로 제어한다.
기본 Enable이므로 필요 없을 때에는 Disable 시켜준다.
- P22, P24, P26을 CEX0, CEX2, CEX4로 설정
#define PCA_SetCEX0CEX2CEX4_P22P24P26() SFRPI=2;AUXR5=AUXR5&(~C0PS0);SFRPI=0
- CF 비트에 의한 인터럽트가 발생하지 않도록 함.
#define PCA_CF_DisInterrupt() CMOD=CMOD&(~(ECF))
PCA 타이머는 단순 카운트만 되도록 하고, 인터럽트는 발생하지 않도록 한다.
- PCA 카운터 동작 시작
#define PCA_EnPCACounter() CR=1
준비가 다 되면 PCA 카운터를 시작시킨다.
4. 프로그램 실행
*** Keil compiler가 인스톨되어 있어야함 ***
해당 Example 폴더를 찾아가 KeilPrj폴더를 Open 한다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\ MG82F6D16_PCA_PWM_16bit\KeilPrj

해당 폴더의 Keil project 파일을 더블 클릭하여 실행시킨다.(MG82F6D16_DEMO.uvproj)
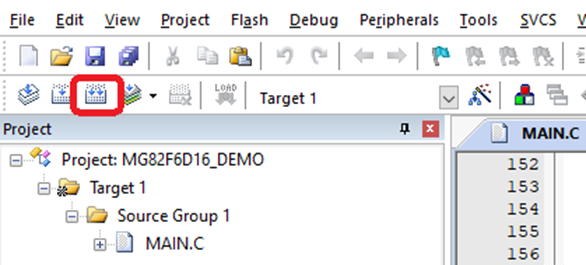
Rebuild 아이콘을 클릭하여 프로젝트를 컴파일 한다.

Demo Board에 USB Connector를 연결하여 전원을 인가하고, 전원 스위치를 ON시키고, OCD ICE를 연결한 상태에서 위 이미지의 Start/Stop Debug Session(Ctrl+F5) 버튼을 눌러 컴파일된 프로젝트의 디버그 데이터를 다운로드 시킨다.(컴파일 시 에러가 발생하지 않아야함)
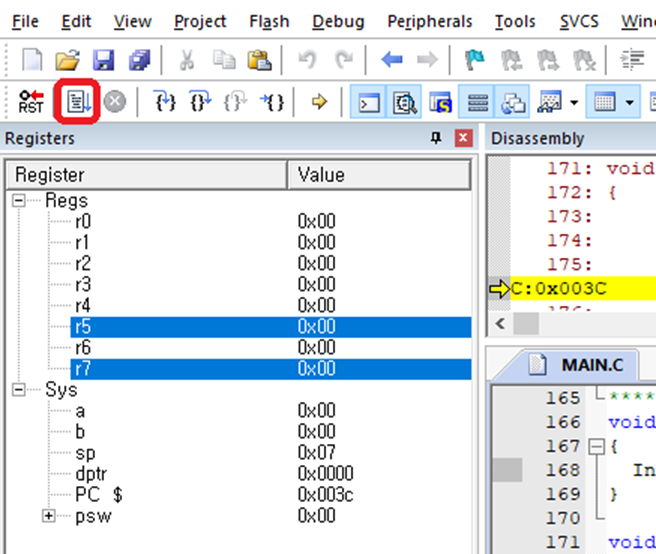
다운로드 후 Run(F5) 버튼을 클릭하면 프로그램이 동작한다.
5. 동작 영상
'MEGAWIN' 카테고리의 다른 글
| MG82F6D Series UART0 TX RX INT (0) | 2022.12.02 |
|---|---|
| MG82F6D Series RTC Timer (0) | 2022.12.01 |
| MG82F6D Series PCA Timer 16bit (0) | 2022.11.29 |
| MG82F6D Series BOD (0) | 2022.11.28 |
| MG82F6D Series INT nINTx Wake UP (0) | 2022.11.25 |