
1. 프로그램 개요
P22는 Green 0 LED, P24는 Red LED, P26은 Green 1 LED가 연결되어 있다.
Brown-Out Detector(BOD0, BOD1)는 VDD 전원을 모니터한다.
BOD0은 1.7V 확인으로 고정되어 있고, BOD1은 4.2V, 3.7V, 2.4V, 2.0V로 설정할 수 있다.
BOD0가 확인 레벨과 맞게 되면 PCON1레지스터의 BOF0 비트가 셋 된다. 만약 ESF(EIE1레지스터의 3번비트와 BOF0IE(SFIE레지스터의 1번 비트)가 사용가능하게 되어 있으면 BOF0는 인터럽트 플래그를 발생시킨다. 정상동작이든 대기모드이든 상관없이 인터럽트가 동작한다. BOD1도 동일한 동작을 하게 되며, 만약 AWBOD1(PCON2 레지스터의 7번 비트)이 셋 되어 있으면 CPU가 Power Down 모드에 있을 때 인터럽트로 Wake up 시키는 것도 가능하다.
2. 회로도
/* LED 부분 회로도 추가 */
3. Code
⑴ main routine
void main()
{
InitSystem(); // 시스템 초기화 루틴
bBOD1Flag=0; // BOD1 발생 플래그
LED_G_0=0;LED_G_1=0;LED_R=0; // LED ALL ON
DelayXms(1000); // 1초 딜레이
LED_G_0=1;LED_G_1=1;LED_R=1; // LED ALL OFF
while(1)
{
DelayXms(200); // 200ms 딜레이
LED_G_0=!LED_G_0; // LED_G Toggle
if(bBOD1Flag) // BOD1 플래그가 셋 되어 있으면
{
if((PCON1 & BOF1)!=0) // PCON1 레지스터의 BOF1이 셋 되어 있으면
{// BOF1 set VDD<3.7V // VDD가 3.7V 미만이 된 것임
PCON1 = BOF1; // clear flag
}
else // BOF1이 클리어 되어 있으면
{// VDD>3.7V // VDD가 3.7V 이상이므로
//Power voltage restored. Enable BOD1 interruption
LED_R=1; // LED_R을 OFF 시키고
bBOD1Flag = FALSE; // bBOD1Flag를 클리어 시키고
INT_EnSF_BOD1(); // 시스템 인터럽트에 BOD1을 등록시킨다.
}
}
}
}
- InitBOD 루틴에서 BOD1에 의해 MCU가 리셋 되도록 설정할 수도 있고, 인터럽트만 발생할 수 있도록 설정할 수도 있다.
- 동작 영상을 보면 BOD1 설정 전압인 3.7V 미만으로 입력 전원이 낮아졌을 때 LED가 켜지는 것을 확인할 수 있다. MCU리셋을 시키지 않았을 때이다.
- MCU 리셋을 시켰을 경우 BOD1 설정 전압 이하로 내려가면 MCU가 리셋에 걸리고, 그 이상이 되면 다시 동작을 시작하는 것을 확인할 수 있다.
- MCU 리셋을 시킬 경우 출력 포트 핀들의 리셋 상태를 확인할 필요가 있다. 불필요한 오동작을 방지하기 위해서 설계시 주의가 필요하다.
⑵ 시스템 초기화 루틴
/***********************************************************************************
*Function: void InitSystem(void)
*Description: Initialize MCU
*Input:
*Output:
*************************************************************************************/
void InitSystem(void)
{
InitPort();
InitBOD();
InitInterrupt();
INT_EnAll(); // Enable global interrupt
}
포트 초기화를 시키고, BOD 초기화를 시킴. 인터럽트를 설정하고 EA를 셋 시켜 인터럽트 동작에 대비한다.
각각의 루틴들을 확인해 보도록 한다.
#define INT_EnAll() EA=1 // Global enable
⑶ 포트 초기화 루틴 è 회로도를 보면서 각 입출력 핀의 속성을 지정한다.
è (EN)MG82F6D16_Datasheet_V051.PDF의 “제 13절 Configurable I/O Ports”를 참조한다.
è (EN)MG82F6D17_Datasheet_V051.PDF의 “제 14절 Configurable I/O Ports”를 참조한다.
è (EN)MG82F6D64/32_Datasheet_V051.PDF의 “제 14절 Configurable I/O Ports”를 참조한다.
/***********************************************************************************
*Function: void InitPort(void)
*Description: Initialize IO Port
*Input:
*Output:
*************************************************************************************/
void InitPort(void)
{
PORT_SetP3QuasiBi(BIT0|BIT1); // Set P30,P31 as Quasi-Bidirectional,For UART.
PORT_SetP2PushPull(BIT2|BIT4|BIT6); // Set P22,P24,P26 as Push-Pull,For LED.
}
- P30, P31 : 각각 RXD0, TXD0 속성을 갖고 있어 양방향 핀으로 설정한다.
#define PORT_SetP3QuasiBi(x) P3M0=P3M0&(~(x));P3M1=P3M1&(~(x))
Port 3의 핀들을 Quasi-Bidirectional(default) 속성으로 설정하려면, P3M0, P3M1 레지스터의 대응되는 비트를 각각 0으로 설정하면 된다.
- P22, P24, P26은 Push-Pull type으로 설정한다.(LED연결)
#define PORT_SetP2PushPull(x) P2M0=P2M0|(x); SFRPI=1;P2M1=P2M1&(~(x));SFRPI=0
Port 2의 핀들을 Push-Pull 속성으로 설정하려면 P2M0의 해당 비트는 1(set), P2M1의 해당비트는 0(clear)로 각각 설정하면 된다.
P2M1 레지스터는 SFR Page 1에서만 설정이 가능하므로 위 매크로에서 보면 SFRPI=1, SFRPI=0의 코드가 추가되었다.
정상적인 동작을 위하여 SFRPI는 default 0으로 항상 유지시킨다.
*** 위 매크로함수는 “API_Macro_MG82FG6D16.H”에서 찾아볼 수 있다.(각각의 IC별로 선언된 API_Macro_MG82FG6Dxx.H를 찾아본다.)
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_BOD\code\include
⑷ BOD 초기화 루틴
/***********************************************************************************
*Function: void InitBOD(void)
*Description: Initialize BOD
*Input:
*Output:
*************************************************************************************/
void InitBOD(void)
{
u8 x;
// clear flag
PCON1=BOF0|BOF1;
è BOF0, BOF1을 Clear 시키기 위하여 해당 비트에 1을 쓴다.
x=BIT0;
è x = 0x01
x=x|POW_BOD1_Enable; // Enable BOD1
è x = 0x05
//x=x|POW_BOD1_Disable; // Disable BOD1
//x=x|POW_BOD1_Set42V; // BOD1 Detecting 4.2V
x=x|POW_BOD1_Set37V; // BOD1 Detecting 3.7V
//x=x|POW_BOD1_Set24V; // BOD1 Detecting 2.4V
//x=x|POW_BOD1_Set20V; // BOD1 Detecting 2.0V
è x = 0x25
//x=x|POW_BOD1_Enable_OnPD; // Enable BOD1 on PD mode
x=x|POW_BOD1_Disable_OnPD; // Disable BOD1 on PD mode
è x = 0x25
x=x|POW_BOD1_EnReset; // Enable BOD1 to trigger a MCU reset
//x=x|POW_BOD1_DisReset; // Disable BOD1 to trigger a MCU reset
è x = 0x2D
x=x|POW_BOD0_EnReset; // Enable BOD0(1.7V) to trigger a MCU reset
//x=x|POW_BOD0_DisReset; // Disable BOD0(1.7V) to trigger a MCU reset
è x = 0x2F
IAP_WritePPage(PCON2_P, x);
è 설정된 데이터를 PCON2에 라이팅한다.
}
- BOD1을 3.7V에 맞춰 동작하도록하고, BD1은 Power Down Mode에서는 동작하지 않도록 하고, BOD0에 의한 리셋이 동작하도록 한다.
⑸ 인터럽트 설정
/***********************************************************************************
*Function: void InitInterrupt(void)
*Description: Initialize Interrupt
*Input:
*Output:
*************************************************************************************/
void InitInterrupt(void)
{
INT_EnSF_BOD1(); // Enable BOD1 interrupt
INT_EnSF(); // Enable SF interrupt
}
- BOD1인터럽트 사용 설정
- SF 인터럽트사용 설정
4. 프로그램 실행
*** Keil compiler가 인스톨되어 있어야함 ***
해당 Example 폴더를 찾아가 KeilPrj폴더를 Open 한다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_BOD\KeilPrj
해당 폴더의 Keil project 파일을 더블클릭하여 실행시킨다.(MG82F6D16_DEMO.uvproj)
Rebuild 아이콘을 클릭하여 프로젝트를 컴파일 한다.
Demo Board에 USB Connector를 연결하여 전원을 인가하고, 전원 스위치를 ON시키고, OCD ICE를 연결한 상태에서 위 이미지의 Start/Stop Debug Session(Ctrl+F5) 버튼을 눌러 컴파일된 프로젝트의 디버그 데이터를 다운로드 시킨다.(컴파일 시 에러가 발생하지 않아야함)
다운로드 후 Run(F5) 버튼을 클릭하면 프로그램이 동작한다.
5. 동작 영상
https://youtube.com/shorts/fJKv2uDqGn0?feature=share
1. 프로그램 개요
P22는 Green 0 LED, P24는 Red LED, P26은 Green 1 LED가 연결되어 있다.
Brown-Out Detector(BOD0, BOD1)는 VDD 전원을 모니터한다.
BOD0은 1.7V 확인으로 고정되어 있고, BOD1은 4.2V, 3.7V, 2.4V, 2.0V로 설정할 수 있다.
BOD0가 확인 레벨과 맞게 되면 PCON1레지스터의 BOF0 비트가 셋 된다. 만약 ESF(EIE1레지스터의 3번비트와 BOF0IE(SFIE레지스터의 1번 비트)가 사용가능하게 되어 있으면 BOF0는 인터럽트 플래그를 발생시킨다. 정상동작이든 대기모드이든 상관없이 인터럽트가 동작한다. BOD1도 동일한 동작을 하게 되며, 만약 AWBOD1(PCON2 레지스터의 7번 비트)이 셋 되어 있으면 CPU가 Power Down 모드에 있을 때 인터럽트로 Wake up 시키는 것도 가능하다.
2. 회로도
/* LED 부분 회로도 추가 */
3. Code
⑴ main routine
void main()
{
InitSystem(); // 시스템 초기화 루틴
bBOD1Flag=0; // BOD1 발생 플래그
LED_G_0=0;LED_G_1=0;LED_R=0; // LED ALL ON
DelayXms(1000); // 1초 딜레이
LED_G_0=1;LED_G_1=1;LED_R=1; // LED ALL OFF
while(1)
{
DelayXms(200); // 200ms 딜레이
LED_G_0=!LED_G_0; // LED_G Toggle
if(bBOD1Flag) // BOD1 플래그가 셋 되어 있으면
{
if((PCON1 & BOF1)!=0) // PCON1 레지스터의 BOF1이 셋 되어 있으면
{// BOF1 set VDD<3.7V // VDD가 3.7V 미만이 된 것임
PCON1 = BOF1; // clear flag
}
else // BOF1이 클리어 되어 있으면
{// VDD>3.7V // VDD가 3.7V 이상이므로
//Power voltage restored. Enable BOD1 interruption
LED_R=1; // LED_R을 OFF 시키고
bBOD1Flag = FALSE; // bBOD1Flag를 클리어 시키고
INT_EnSF_BOD1(); // 시스템 인터럽트에 BOD1을 등록시킨다.
}
}
}
}
- InitBOD 루틴에서 BOD1에 의해 MCU가 리셋 되도록 설정할 수도 있고, 인터럽트만 발생할 수 있도록 설정할 수도 있다.
- 동작 영상을 보면 BOD1 설정 전압인 3.7V 미만으로 입력 전원이 낮아졌을 때 LED가 켜지는 것을 확인할 수 있다. MCU리셋을 시키지 않았을 때이다.
- MCU 리셋을 시켰을 경우 BOD1 설정 전압 이하로 내려가면 MCU가 리셋에 걸리고, 그 이상이 되면 다시 동작을 시작하는 것을 확인할 수 있다.
- MCU 리셋을 시킬 경우 출력 포트 핀들의 리셋 상태를 확인할 필요가 있다. 불필요한 오동작을 방지하기 위해서 설계시 주의가 필요하다.
⑵ 시스템 초기화 루틴
/***********************************************************************************
*Function: void InitSystem(void)
*Description: Initialize MCU
*Input:
*Output:
*************************************************************************************/
void InitSystem(void)
{
InitPort();
InitBOD();
InitInterrupt();
INT_EnAll(); // Enable global interrupt
}
포트 초기화를 시키고, BOD 초기화를 시킴. 인터럽트를 설정하고 EA를 셋 시켜 인터럽트 동작에 대비한다.
각각의 루틴들을 확인해 보도록 한다.
#define INT_EnAll() EA=1 // Global enable
⑶ 포트 초기화 루틴 è 회로도를 보면서 각 입출력 핀의 속성을 지정한다.
è (EN)MG82F6D16_Datasheet_V051.PDF의 “제 13절 Configurable I/O Ports”를 참조한다.
è (EN)MG82F6D17_Datasheet_V051.PDF의 “제 14절 Configurable I/O Ports”를 참조한다.
è (EN)MG82F6D64/32_Datasheet_V051.PDF의 “제 14절 Configurable I/O Ports”를 참조한다.
/***********************************************************************************
*Function: void InitPort(void)
*Description: Initialize IO Port
*Input:
*Output:
*************************************************************************************/
void InitPort(void)
{
PORT_SetP3QuasiBi(BIT0|BIT1); // Set P30,P31 as Quasi-Bidirectional,For UART.
PORT_SetP2PushPull(BIT2|BIT4|BIT6); // Set P22,P24,P26 as Push-Pull,For LED.
}
- P30, P31 : 각각 RXD0, TXD0 속성을 갖고 있어 양방향 핀으로 설정한다.
#define PORT_SetP3QuasiBi(x) P3M0=P3M0&(~(x));P3M1=P3M1&(~(x))
Port 3의 핀들을 Quasi-Bidirectional(default) 속성으로 설정하려면, P3M0, P3M1 레지스터의 대응되는 비트를 각각 0으로 설정하면 된다.
- P22, P24, P26은 Push-Pull type으로 설정한다.(LED연결)
#define PORT_SetP2PushPull(x) P2M0=P2M0|(x); SFRPI=1;P2M1=P2M1&(~(x));SFRPI=0
Port 2의 핀들을 Push-Pull 속성으로 설정하려면 P2M0의 해당 비트는 1(set), P2M1의 해당비트는 0(clear)로 각각 설정하면 된다.
P2M1 레지스터는 SFR Page 1에서만 설정이 가능하므로 위 매크로에서 보면 SFRPI=1, SFRPI=0의 코드가 추가되었다.
정상적인 동작을 위하여 SFRPI는 default 0으로 항상 유지시킨다.
*** 위 매크로함수는 “API_Macro_MG82FG6D16.H”에서 찾아볼 수 있다.(각각의 IC별로 선언된 API_Macro_MG82FG6Dxx.H를 찾아본다.)
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_BOD\code\include
⑷ BOD 초기화 루틴
/***********************************************************************************
*Function: void InitBOD(void)
*Description: Initialize BOD
*Input:
*Output:
*************************************************************************************/
void InitBOD(void)
{
u8 x;
// clear flag
PCON1=BOF0|BOF1;
è BOF0, BOF1을 Clear 시키기 위하여 해당 비트에 1을 쓴다.
x=BIT0;
è x = 0x01
x=x|POW_BOD1_Enable; // Enable BOD1
è x = 0x05
//x=x|POW_BOD1_Disable; // Disable BOD1
//x=x|POW_BOD1_Set42V; // BOD1 Detecting 4.2V
x=x|POW_BOD1_Set37V; // BOD1 Detecting 3.7V
//x=x|POW_BOD1_Set24V; // BOD1 Detecting 2.4V
//x=x|POW_BOD1_Set20V; // BOD1 Detecting 2.0V
è x = 0x25
//x=x|POW_BOD1_Enable_OnPD; // Enable BOD1 on PD mode
x=x|POW_BOD1_Disable_OnPD; // Disable BOD1 on PD mode
è x = 0x25
x=x|POW_BOD1_EnReset; // Enable BOD1 to trigger a MCU reset
//x=x|POW_BOD1_DisReset; // Disable BOD1 to trigger a MCU reset
è x = 0x2D
x=x|POW_BOD0_EnReset; // Enable BOD0(1.7V) to trigger a MCU reset
//x=x|POW_BOD0_DisReset; // Disable BOD0(1.7V) to trigger a MCU reset
è x = 0x2F
IAP_WritePPage(PCON2_P, x);
è 설정된 데이터를 PCON2에 라이팅한다.
}
- BOD1을 3.7V에 맞춰 동작하도록하고, BD1은 Power Down Mode에서는 동작하지 않도록 하고, BOD0에 의한 리셋이 동작하도록 한다.
⑸ 인터럽트 설정
/***********************************************************************************
*Function: void InitInterrupt(void)
*Description: Initialize Interrupt
*Input:
*Output:
*************************************************************************************/
void InitInterrupt(void)
{
INT_EnSF_BOD1(); // Enable BOD1 interrupt
INT_EnSF(); // Enable SF interrupt
}
- BOD1인터럽트 사용 설정
- SF 인터럽트사용 설정
4. 프로그램 실행
*** Keil compiler가 인스톨되어 있어야함 ***
해당 Example 폴더를 찾아가 KeilPrj폴더를 Open 한다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_BOD\KeilPrj
해당 폴더의 Keil project 파일을 더블클릭하여 실행시킨다.(MG82F6D16_DEMO.uvproj)
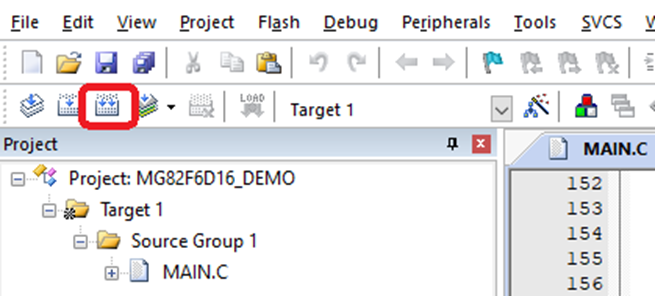
Rebuild 아이콘을 클릭하여 프로젝트를 컴파일 한다.

Demo Board에 USB Connector를 연결하여 전원을 인가하고, 전원 스위치를 ON시키고, OCD ICE를 연결한 상태에서 위 이미지의 Start/Stop Debug Session(Ctrl+F5) 버튼을 눌러 컴파일된 프로젝트의 디버그 데이터를 다운로드 시킨다.(컴파일 시 에러가 발생하지 않아야함)

다운로드 후 Run(F5) 버튼을 클릭하면 프로그램이 동작한다.
5. 동작 영상
https://youtube.com/shorts/fJKv2uDqGn0?feature=share

'MEGAWIN' 카테고리의 다른 글
| MG82F6D PCA PWM 16bit (0) | 2022.11.30 |
|---|---|
| MG82F6D Series PCA Timer 16bit (0) | 2022.11.29 |
| MG82F6D Series INT nINTx Wake UP (0) | 2022.11.25 |
| MG82F6D Series CMP (0) | 2022.11.24 |
| MG82F6D Series TIM_T0T1_Mode 0 (0) | 2022.11.23 |