MG82F6D Series I2C Slave Int
1. 프로그램 개요
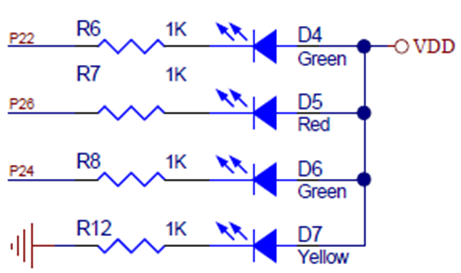
P22는 Green 0 LED, P24는 Red LED, P26은 Green 1 LED가 연결되어 있다.
MG82F6D 보드는 Slave로 셋팅하고, MG32F02A072AD4 IC를 이용한 보드를 Master로 설정한다.
Master에서 Slave로 데이터 어드레스, 16바이트의 데이터를 지속적으로 전송하고, Slave에서는 I2C를 이용해서 수신된 데이터를 UART0으로 전송한다.
2. 회로도
3. Code
⑴ main routine
void main()
{
u8 i;
InitSystem(); // 시스템 초기화
SendStr("\nStart"); // UART0으로 프로그램의 시작을 알림
LED_G_0=0;LED_G_1=0;LED_R=0; // LED ALL ON
DelayXms(1000); // 1초 딜레이
LED_G_0=1;LED_G_1=1;LED_R=1; // LED ALL OFF
TWI0OvTime = 0; // clear Overtime
while(1)
{
if(LedTime==0) // LED 토글 시간이 다되면
{
LED_R = !LED_R; // LED_R을 토글 시키고
if(LED_R==0) // LED_R이 ON이면
{
LedTime=20; // 딜레이를 20ms로 설정하고
}
else // LED_R이 OFF 이면
{
LedTime=250; // 딜레이 시간을 250ms로 설정하여 LED가 깜빡이는 시간을 조절한다.
}
}
if(bTWI0RXFlag==TRUE) // TWI0RXFlag가 TRUE이면, TWI0로 데이터가 수신 된 것이 있으면
{
LED_G_0=0;LED_R=1; // LED_G는 ON 시키고, LED_R은 OFF 시킨다.
SendStr("\nTWI0 RX 0x"); // UART0로 “TWI0 RX 0xHHLL”로 데이터 어드레스를 전송하고
SendHex(TWI0RegAddr.B.BHigh);
SendHex(TWI0RegAddr.B.BLow);
for(i=0;i<TEST_BUF_SIZE;i++) // 수신한 16바이트의 데이터를 전송한다.
{
SendByte(' ');
SendHex(TWI0Buf[i]);
}
bTWI0RXFlag=FALSE; // 다음 수신을 위해 bTWI0RXFlag는 False로 만들고
LED_G_0=1;LED_R=1; // LED_G는 ON 시키고, LED_R은 OFF 시킨다.
LedTime=250; // LED 딜레이 시간을 250ms로 설정한다.
}
if(bTWI0Error==TRUE) // bTWI0Error가 TRUE이면,(TWI0에 에러가 있으면)
{
bTWI0Error=FALSE; // bTWI0Error를 FALSE로 클리어 시키고
// error,reset TWI0
LED_G_0=0;LED_R=0; // LED_G_0, LED_R을 ON 시키고
InitTWI0_Slave(); // TWI0를 Slave로 다시 초기화 시키고
DelayXms(50); // 50ms 딜레이를 시키고
LED_G_0=1;LED_R=1; // LED_G_0, LED_R을 OFF시키고
LedTime=250; // LED 딜레이 시간을 250ms로 설정한다.
}
}
}
⑵ 시스템 초기화 루틴
/***********************************************************************************
*Function: void InitSystem(void)
*Description: Initialize MCU
*Input:
*Output:
*************************************************************************************/
void InitSystem(void)
{
InitPort();
InitClock();
InitTWI0_Slave();
InitTimer0();
InitUart0_T1();
InitInterrupt();
INT_EnAll(); // Enable global interrupt
}
- 포트 설정 수행한다.
⑶ Port 초기화
/***********************************************************************************
*Function: void InitPort(void)
*Description: Initialize IO Port
*Input:
*Output:
*************************************************************************************/
void InitPort(void)
{
PORT_SetP2PushPull(BIT2|BIT4|BIT6); // Set P22,P24,P26 as Push-Pull,For LED.
è P22, P24, P26은 LED 구동을 위하여 Push-Pull type로 설정한다.
PORT_SetP4OpenDrainPu(BIT0|BIT1); // Set P40,P41as open-drain with pull-high,For I2C
è P40, P41을 Pull Up을 갖는 Open Drain타입으로 설정한다. I2C 핀으로 사용한다.
}
*** 사용된 매크로함수는 “API_Macro_MG82FG6D16.H”에서 찾아볼 수 있다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\MG82F6D16_GPIO_I2C_Slave_Int\code\include
⑷ 클럭 초기화 루틴 è 시스템 클럭 및 내부 클럭을 설정한다.
프로그램의 루틴 자체는 복잡하게 많이 설정해 두었으나 그 구조는 아래와 같다.
MCU_SYSCLK의 값은 11059200, 12000000, 22118400, 24000000, 29491200, 32000000, 44236800, 48000000로 설정이 가능하며, 각각 프로그램 상단에
#define MCU_SYSCLK 12000000
와 같이 선언해주었다. 그리고, 바로
#define MCU_CPUCLK (MCU_SYSCLK)
로 선언하여 System 클럭과 CPU 클럭을 동일하게 사용하기로 선언하였다. 물론 사용자의 선택에 따라 틀려질 수 있으므로 어플리케이션에 따라 선언하면 된다.
#if (MCU_SYSCLK==12000000) // System Clock를 12MHz로 선언되어 있으면
#if (MCU_CPUCLK==MCU_SYSCLK) // CPU Clock가 System Clock와 동일하면
// SysClk=12MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1); // 이와 같이 설정하고
#else
// SysClk=12MHz CpuClk=6MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1); // CPU clock는 System Clock와 같거나 1/2로 설정할
// 수 있다.
#endif
#endif
- CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1);
CKCON0 레지스터의 각 비트를 설정한다.
CKCON0.7 : AFS, Alternated Frequency Selection, 내부 클럭 IHRCO를 12MHz(AFS = 0), 또는 11.059MHz(AFS = 1)로 설정함
CKCON0.3 : CCKS, CPU Clock Select, 0:CPU CLOCK = System Clock, 1:CPU CLOCK = System Clock/2
CKCON0.0 ~ 2 : Programable System Clock Select. SYSCLK_MCKDO_DIV_1(System Clock = Master Clock Divider Output)
/***********************************************************************************
*Function: void InitClock(void)
*Description:
* Initialize clock
*Input:
*Output:
*************************************************************************************/
void InitClock(void)
{
#if (MCU_SYSCLK==11059200)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=11.0592MHz CpuClk=11.0592MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1);
#else
// SysClk=11.0592MHz CpuClk=5.5296MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1);
#endif
#endif
#if (MCU_SYSCLK==12000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=12MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1);
#else
// SysClk=12MHz CpuClk=6MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1);
#endif
#endif
#if (MCU_SYSCLK==22118400)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=22.1184MHz CpuClk=22.1184MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#else
// SysClk=22.1184MHz CpuClk=11.0592MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==24000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// SysClk=24MHz CpuClk=24MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#else
// SysClk=24MHz CpuClk=12MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx4, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X4|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==29491200)
#if (MCU_CPUCLK==MCU_SYSCLK)
// Cpuclk high speed
CLK_SetCpuCLK_HighSpeed();
// SysClk=29.491200MHz CpuClk=29.491200MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#else
// SysClk=29.491200MHz CpuClk=14.7456MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==32000000)
#if (MCU_CPUCLK==MCU_SYSCLK)
// Cpuclk high speed
CLK_SetCpuCLK_HighSpeed();
// SysClk=32MHz CpuClk=32MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#else
// SysClk=32MHz CpuClk=16MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx5.33, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X533|OSCIn_IHRCO);
#endif
#endif
#if (MCU_SYSCLK==44236800)
// SysClk=44.2368MHz CpuClk=22.1184MHz
CLK_SetCKCON0(IHRCO_110592MHz|CPUCLK_SYSCLK_DIV_1|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx8, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X8|OSCIn_IHRCO);
#endif
#if (MCU_SYSCLK==48000000)
// SysClk=48MHz CpuClk=24MHz
CLK_SetCKCON0(IHRCO_12MHz|CPUCLK_SYSCLK_DIV_2|SYSCLK_MCKDO_DIV_1|ENABLE_CKM|CKM_OSCIN_DIV_2);
DelayXus(100);
// IHRCO, MCK=CKMIx8, OSCin=IHRCO
CLK_SetCKCON2(ENABLE_IHRCO|MCK_CKMI_X8|OSCIn_IHRCO);
#endif
// P60 Output MCK/4
//CLK_P60OC_MCKDiv4();
}
⑸ I2C Slave초기화
/***********************************************************************************
*Function: void InitTWI0_Slave(void)
*Description: Initialize TWI0 for Slave
*Input:
*Output:
*************************************************************************************/
void InitTWI0_Slave()
{
TWI0_Clear();
TWI0_SetClock(TWI0_CLK_SYSCLK_32);
TWI0_SetUseP40P41();
TWI0_Enable();
TWI0_SetSlaveAddr(SLAVE_ADDRESS);
TWI0_SendACK();
}
- 제어레지스터 클리어
#define TWI0_Clear() SICON=0
SICON(TWI0 제어레지스터)를 클리어 시킨다.
- I2C 클럭 주파수설정
#define TWI0_SetClock(x) SICON=(SICON&B01111100)|((x&0x03)|((x<<5)&B10000000))
CR2, CR1, CR0를 이용하여 I2C 클럭을 설정한다.
#define TWI0_CLK_SYSCLK_32 2 // SYSCLK/32
예제에서는 System Clock의 1/32을 클럭으로 사용하도록 하였다. 12MHz의 시스템 클럭일 경우 375kHz의 I2C 클럭을 사용한다.
- P40(SCL), P41(SDA) 설정
#define TWI0_SetUseP40P41() SFRPI=0;AUXR3=(AUXR3&(~(TWIPS1|TWIPS0)))
AUXR3 레지스터의 TWIPS1, 0을 클리어 시켜 I2C 핀으로 P40, P41을 매핑 시킨다.
- I2C 동작 시작
#define TWI0_Enable() SICON=SICON|(ENSI)
SICON 레지스터의 ENSI를 셋 시켜 I2C를 동작 시킨다.
- I2C 슬레이브 어드레스 저장
#define TWI0_SetSlaveAddr(x) SIADR=x // Set slave addr
#define SLAVE_ADDRESS 0xA0
SIADR 레지스터에 슬레이브 어드레스 0xA0를 저장한다.
- 수신 준비
#define TWI0_SendACK() SICON |= AA // Send ACK
SICON레지스터의 AA를 셋 시켜서 ACK를 보낼 준비를 한다.
⑹ 타이머 0 초기화
/***********************************************************************************
*Function: void InitTimer0()
*Description: Initialize Timer0
*Input:
*Output:
*************************************************************************************/
void InitTimer0(void)
{
TM_SetT0Mode_1_16BIT_TIMER(); // TIMER0 Mode: 16-bit
TM_SetT0Clock_SYSCLKDiv12(); // TIMER0 Clock source: SYSCLK/12
TM_SetT0Gate_Disable(); // TIMER0 disable gate
TM_SetT0LowByte(TIMER_12T_1ms_TL); // Sets TL0 value
TM_SetT0HighByte(TIMER_12T_1ms_TH); // Sets TH0 value
TM_EnableT0(); // Enable TIMER0
}
- 타이머 0의 모드 설정
#define TM_SetT0Mode_1_16BIT_TIMER() TMOD=(TMOD&(~(T0M0|T0M1)))|(T0M0)
T0M1=0, T0M0=1로하여 모드 1의 16비트 타이머로 설정한다.
- 타이머 0의 클럭 설정
#define TM_SetT0Clock_SYSCLKDiv12() AUXR3=(AUXR3&(~T0XL));AUXR2=(AUXR2&(~T0X12));TMOD=(TMOD&(~T0C_T))
T0XL = 0, T0X12 = 0, T0C/T = 0으로 저장하여 타이머 0의 클럭을 (SYSCLK/12)로 결정한다.
SYSCLK 이 12MHz이므로, 타이머 0의 클럭은 1MHz이다. 따라서 타이머 0은 1us마다 1씩 증가한다.
- 게이트 사용하지 않음
#define TM_SetT0Gate_Disable() TMOD=TMOD&(~T0GATE)
타이머 0의 Gate를 사용하지 않는 것으로 설정한다.
- 1ms 타이머로 설정
#define TM_SetT0HighByte(x) TH0=x
#define TM_SetT0LowByte(x) TL0=x
타이머 0이 1ms 타이머가 되도록 TH0, TL0에 초기값을 저장한다.
- 타이머 0 시작
#define TM_EnableT0() TR0=1
TR0를 셋 시켜 타이머 0을 동작 시킨다.
⑺ UART0초기화 èTimer 1 Overflow를 이용한 Baud Rate 설정
/***********************************************************************************
*Function: void InitUart0_T1(void)
*Description: Initialize Uart0, The source of baud rate was T1
*Input:
*Output:
*************************************************************************************/
void InitUart0_T1(void)
{
UART0_SetMode8bitUARTVar(); // UART0 Mode: 8-bit, Variable B.R.
UART0_EnReception(); // Enable reception
UART0_SetBRGFromT1(); // B.R. source:T1
UART0_SetT1BaudRateX2(); // B.R. x2
TM_SetT1Mode_2_8BIT_AUTORELOAD();
TM_SetT1Clock_SYSCLK();
TM_SetT1Gate_Disable();
// Sets B.R. value
TM_SetT1HighByte(T1_BRGRL_9600_2X_12000000_1T);
TM_SetT1LowByte(T1_BRGRL_9600_2X_12000000_1T);
TM_EnableT1();
}
- UART0의 MODE 설정
#define UART0_SetMode8bitUARTVar() S0CFG=S0CFG&(~SM30);SM00_FE=0;SM10=1
S0CFG 레지스터의 SM30bit, S0CON 레지스터의 SM00/FE, SM10 비트의 조합으로 여러가지 시리얼 포트 동작 모드를 설정할 수 있다. 그 중 본 예제는 8-bit UART, Variable Baud Rate 특성인 MODE 1을 사용한다.
- UART0의 Receive Enable
#define UART0_EnReception() REN0=1
UART0이 시리얼 통신으로 데이터를 받아들일 수 있도록 설정한다. S0CON 레지스터의 REN0를 셋(=1) 시킨다.
- UART0의 Baud Rate를 Timer 1을 이용해서 만든다.
#define UART0_SetBRGFromT1() SFRPI=1;T2MOD1=T2MOD1&(~TL2IS);SFRPI=0;RCLK_TF2L=0;TCLK_TL2IE=0
SFR PAGE 1에 위치한 T2MOD1 레지스터의 TL2IS 플래그를 클리어 시켜 T2CON의 5번, 4번 비트가 RCLK, TCLK 제어 비트로 동작 할 수 있도록 한다.
RCLK 비트를 0으로 만들어 Timer 1의 Overflow가 UART0의 수신 Clock으로 사용될 수 있도록 설정한다.
TCLK 비트를 0으로 만들어 Timer 1의 Overflow가 UART0의 송신 Clock으로 사용될 수 있도록 설정한다.
- Double Baud Rate 설정
#define UART0_SetT1BaudRateX2() PCON0=PCON0|(SMOD1);S0CFG=S0CFG&(~SMOD2)
PCON0 레지스터의 SMOD1 플래그를 셋 시켜 UART0 MODE 1, 2, 3의 Double Baud Rate를 Enable 시킨다.
S0CFG 레지스터의 SMOD2 플래그를 클리어 시켜 USRT0의 Extra Double Baud Rate를 Disable 시킨다.
- Timer 1을 모드 2 8-bit Auto Reload 모드로 설정.
#define TM_SetT1Mode_2_8BIT_AUTORELOAD() TMOD=(TMOD&(~(T1M0|T1M1)))|(T1M1)
타이머 1을 모드 2로 설정한다.(T1M0 = 0, T1M1 = 1) 8-bit 타이머로 자동 재적재 기능(Automatic Reload)으로 동작한다.
- Timer 1의 클럭 설정
#define TM_SetT1Clock_SYSCLK() AUXR2=(AUXR2|(T1X12));TMOD=(TMOD&(~T1C_T))
AUXR2 레지스터의 T1X12를 셋, TMOD 레지스터의 T1C/T를 Clear 시킴으로써 Timer 1의 Clock Source를 SYSCLK로 설정한다.
- Gate Disable(타이머클럭선택, 타이머 트리거 방법 선택)
#define TM_SetT1Gate_Disable() TMOD=TMOD&(~T1GATE)
TMOD레지스터의 T1GATE 비트는 TIMER 1의 클럭 소스를 결정하는 곳과 TIMER 1의 트리거 방법을 설정하는 곳에 사용된다. T1GATE를 Clear 시킴으로써 TIMER 1 클럭 소스를 System Clock or (System Clock/12) 중 하나로 선택할 수 있고, 클럭이 타이머에 입력되는 것(트리거시그널)을 제어하는 것을 TR1비트로 설정할 수도 있다.
- 타이머 1의 상/하위 레지스터의 값을 저장
TM_SetT1HighByte(T1_BRGRL_9600_2X_12000000_1T);
TM_SetT1LowByte(T1_BRGRL_9600_2X_12000000_1T);
타이머 1은 UP Counter로 동작하고 0xFF에서 0x00으로 바뀔 때 Overflow 이벤트가 발생한다.
자동 재적재 기능을 갖는 Mode 2 8-bit timer로 설정하였기 때문에 실제 동작하는 카운터는 TL1레지스터이고, TH1은 재적재할 카운터 값을 저장한다. TL1레지스터의 값이 0xFF에서 0x00으로 변하면서 Overflow 이벤트가 발생하면 TH1에 저장되어 있는 데이터가 자동으로 TL1에 재적재 된다.
12MHz 클럭을 사용하고, T1X12=1, SMOD2=0, SMOD1 = 1으로 설정하였으므로 재적재 될 값은 178(0xB2)이다.(데이터시트상의 표 참조)
- 타이머 1 Enable(시작)
TM_EnableT1();
마지막으로 TR1 비트를 셋 시켜 타이머 1을 동작 시킨다.
è (EN)MG82F6D16_Datasheet_V051.PDF의 17. Serial Port 0(UART0)를 참조한다.
è (EN)MG82F6D17_Datasheet_V051.PDF의 18. Serial Port 0(UART0)를 참조한다.
è (EN)MG82F6D64/32_Datasheet_V051.PDF의 18. Serial Port 0(UART0)를 참조한다.
⑻ 인터럽트 설정
/***********************************************************************************
*Function: void InitInterrupt(void)
*Description: Initialize Interrupt
*Input:
*Output:
*************************************************************************************/
void InitInterrupt(void)
{
INT_EnTIMER0(); // Enable TIMER0 interrupt
INT_EnTWI0(); // Enable TWI0 interrupt
}
- 타이머 0 인터럽트를 설정한다.
#define INT_EnTIMER0() ET0=1
- I2C 인터럽트를 설정한다.
#define INT_EnTWI0() EIE1=EIE1|ETWI0
- Global Interrupt Enable 비트 셋
#define INT_EnAll() EA=1 // Global enable
선언한 인터럽트들이 동작하려면 EA 비트를 셋 시켜야한다.
⑼ TWI0 Interrupt Service Routine
* 이 인터럽트 서비스 루틴은 MEGAWIN에서 기본으로 제공한 것이고, 각자의 취향에 맞는 동작을 설정 해야 한다.
** 본 예제에 맞도록 설계해 둔 것이므로 특정 목적에는 맞지 않을 수 있다.
/***********************************************************************************
*Function: void INT_TWSI(void)
*Description: TWI0 Interrupt handler
*Input:
*Output:
*************************************************************************************/
void INT_TWI0() interrupt INT_VECTOR_TWI0
{
if(SISTA==0x80)
{ // 0x80: DATA has been received. ACK has been returned. 데이터가 수신되면 ACK를 보내고
TWI0OvTime = TWI_OV_TIME_MAX; // reset IIC overtime
if(bTWI0ADFlag==0) // 어드레스 플래그가 0이면 두 바이트의 어드레스를 받아들인다.
{// Reg address
if(TWI0Inx==0) // 데이터 수신 카운트가 0이면
{
TWI0RegAddr.B.BHigh=SIDAT; // 데이터어드레스의 상위바이트에 저장하고
TWI0Inx++;
}
else
{
TWI0RegAddr.B.BLow=SIDAT; // 그 다음 데이터는 하위 바이트에 저장한다.
bTWI0ADFlag=1; // next is Data, 어드레스를 수신했으므로 다음은 데이터임을 표시
TWI0Inx=0;
}
}
else
{
TWI0Buf[TWI0Inx]=SIDAT; // data, 데이터를 수신하면서
TWI0Inx++; // 데이터 수신 카운트를 증가시키고
if(TWI0Inx>=TEST_BUF_SIZE) // 버퍼사이즈 이상으로 데이터를 받으면
{
bTWI0RXFlag=TRUE; // 데이터 수신 플래그를 TRUE로 만들고
TWI0Inx=0; // 데이터 카운트를 클리어 시킨다.
TWI0OvTime = 0; // receive data complete
}
}
}
else if((SISTA==0x60)||(SISTA==0x68))
{// 0x60,0x68: Own SLA+W has been received. ACK has been returned, 디바이스 어드레스가 수신되어 ACK를 보내고
bTWI0ADFlag=0; // 어드레스 플래그를 클리어시키고
TWI0Inx=0; // 수신데이터 카운트를 클리어시킨다,
TWI0OvTime = TWI_OV_TIME_MAX; // reset IIC overtime
}
else if((SISTA==0xA8)||(SISTA==0xB0)) // 데이터 읽기 일 경우에는
{// 0xA8,0xB0: Own SLA+R has been received. ACK has been returned
TWI0Inx=0; //
goto _IIC_SET_SIDAT; // 데이터 전송 루틴을 수행한다.
}
else if((SISTA==0xB8)||(SISTA==0xC0)||(SISTA==0xC8))
{
// 0xB8: Data byte in SIDAT has been transmitted ACK has been received
// 0xC0: Data byte or Last data byte in SIDAT has been transmitted Not ACK has been received
// 0xC8: Last Data byte in SIDAT has been transmitted ACK has been received
// 데이터 전송 후 ACK, NACK가 수신되었을 경우
_IIC_SET_SIDAT:
TWI0OvTime = TWI_OV_TIME_MAX; // reset IIC overtime
if(TWI0Inx>=TEST_BUF_SIZE) // 버퍼 사이즈 이상으로 데이터를 전송했으면
{
TWI0Inx=0; //
TWI0OvTime = 0; // send data complete
}
SIDAT=TWI0Buf[TWI0Inx]; //
TWI0Inx++;
}
TWI0_SCL=0;
SICON=SICON|(AA); // Set AA, 인터럽트 루틴을 탈출하기 전에 AA를 셋 시킨다.
SICON=SICON&(~SI); // clear interrupt flag
TWI0_SCL=1;
}
4. 프로그램 실행
*** Keil compiler가 인스톨되어 있어야함 ***
해당 Example 폴더를 찾아가 KeilPrj폴더를 Open 한다.
\Megawin 8051\(EN)MG82F6D16_SampleCode_v1.20\ MG82F6D16_I2C_Slave_Int\KeilPrj

해당 폴더의 Keil project 파일을 더블 클릭하여 실행시킨다.(MG82F6D16_DEMO.uvproj)
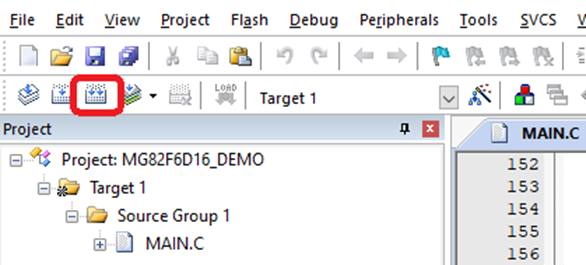
Rebuild 아이콘을 클릭하여 프로젝트를 컴파일 한다.

Demo Board에 USB Connector를 연결하여 전원을 인가하고, 전원 스위치를 ON시키고, OCD ICE를 연결한 상태에서 위 이미지의 Start/Stop Debug Session(Ctrl+F5) 버튼을 눌러 컴파일된 프로젝트의 디버그 데이터를 다운로드 시킨다.(컴파일 시 에러가 발생하지 않아야함)
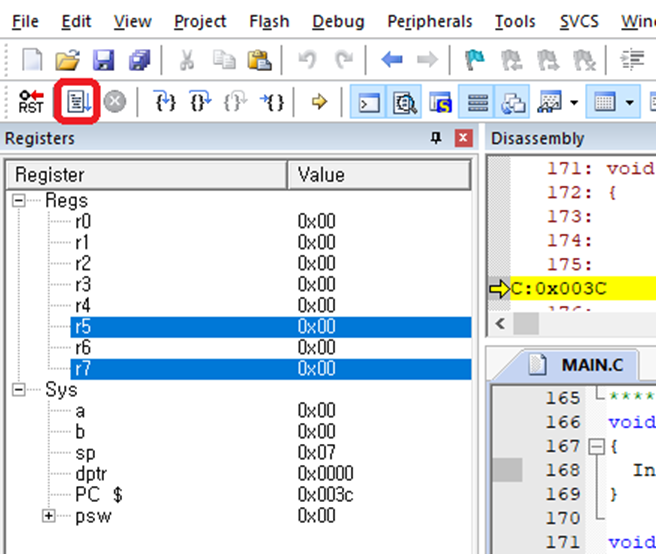
다운로드 후 Run(F5) 버튼을 클릭하면 프로그램이 동작한다.
5. 동작 영상